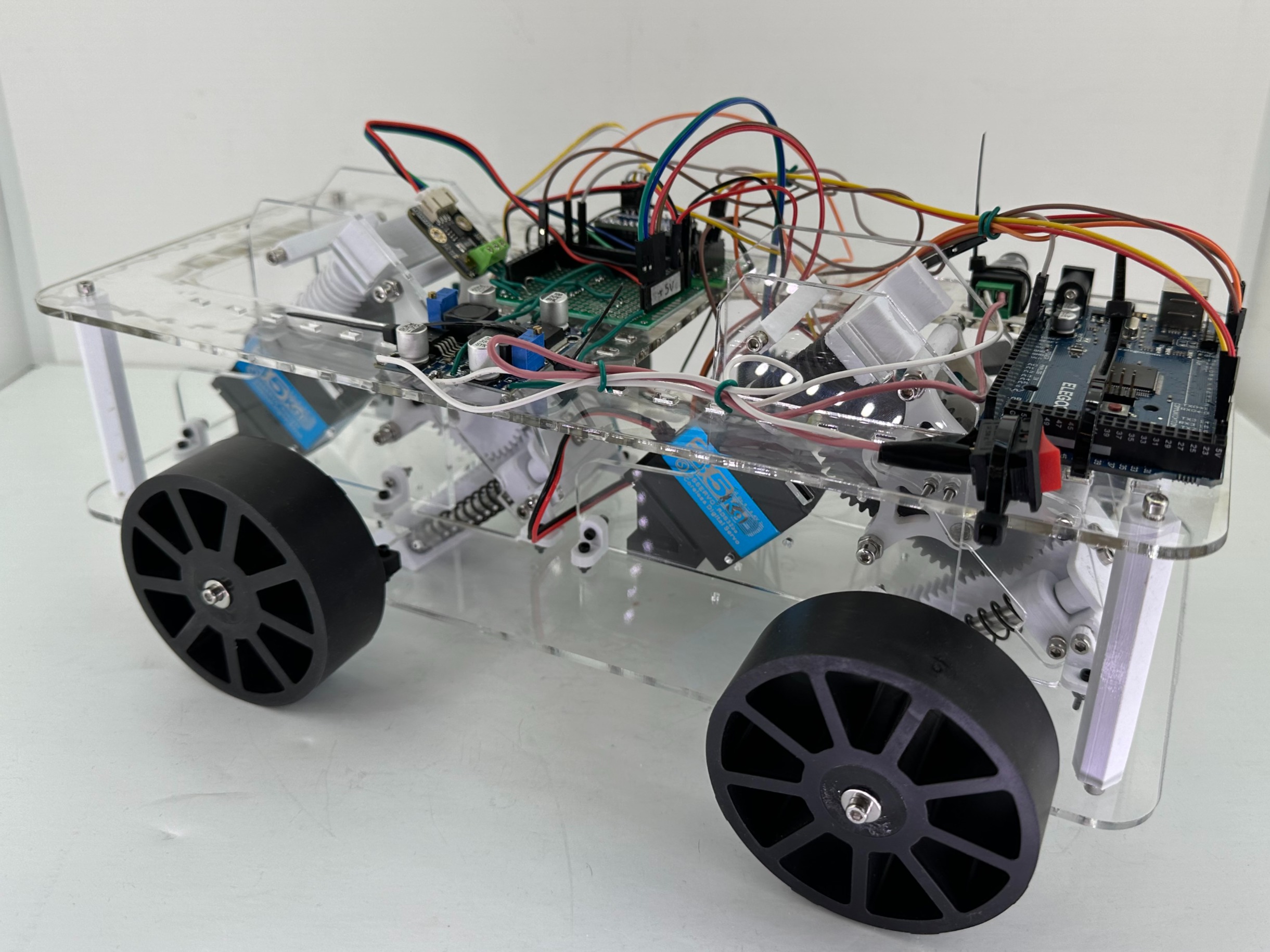
Hopper
A robot that jumps!
WHAT
-
Redesigned and fabricated geartrain for spring-loaded jumping mechanism
-
Designed the electronics layout for data signals and power
-
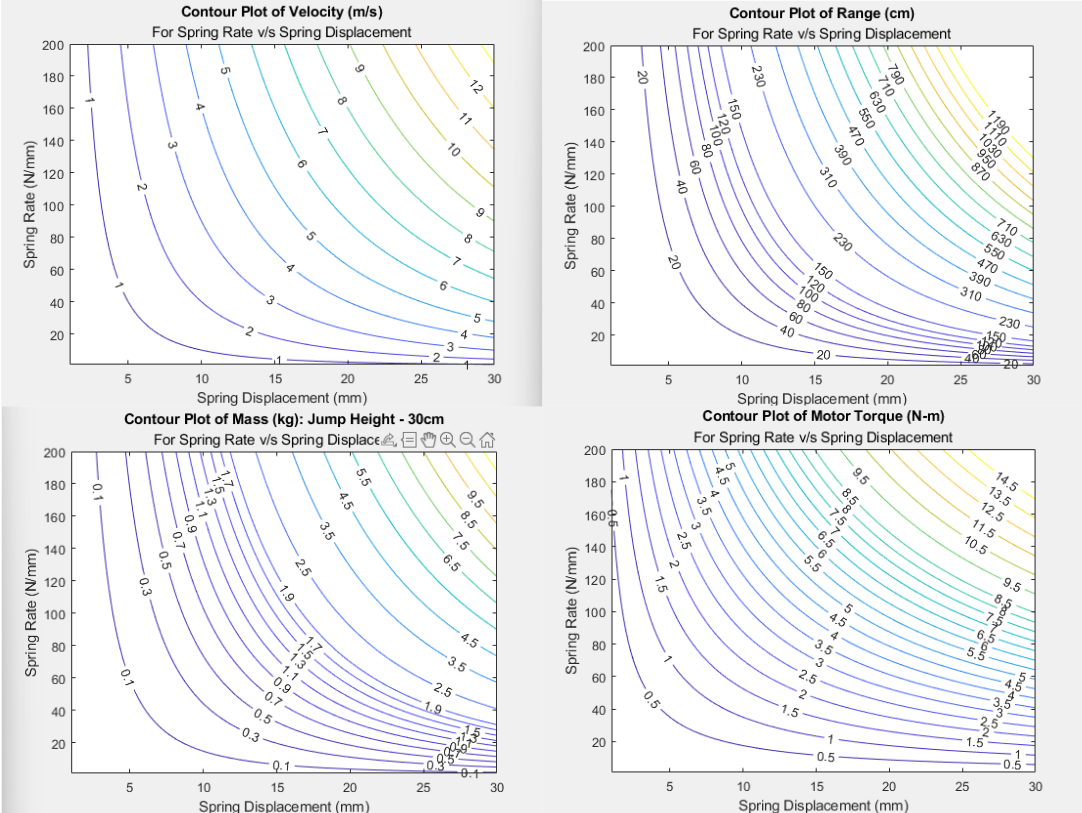
Calculated system dynamics based on equations of motion to determine motor parameters
-
Selected and integrated positional sensors, power systems (converters, battery), micro-controller and actuators for the system
HOW
-
Based on torque calculations, redesigned gearbox from compound spur to worm wheel geartrain in Fusion360
-
Prototyped gearbox using rapid prototyping (FDM 3D Printing)
-
Plotted equations of motion in MATLAB to determine co-relation between robot parameters and motor specs
-
Conducted a structural stress analysis in ANSYS Mechanical using loads from system dynamics to validate design
RESULTS
-
Increased gear ratio by 10x by integrating worm wheel
-
Robot demonstrated a maximum jump range of 159mm, with a mass of 1.05 kg

SUMMARY
Traversing rough terrain while being energy efficient is a task that robots of all categories are being exposed to. Primarily quadrupeds and wheeled robots are on the forefront in terms of both research and development for energy efficient robots for traversing rough terrain. In nature animals utilize both running and jumping, be it to avoid predators or to get over obstacles. Hopper was built towards testing and validating whether jumping for robots is more energy efficient than wheeled locomotion, when it comes to navigating through uneven terrain. For the jumping behavior, we drew our inspiration from springboks. Springboks exhibit pronking behavior, leaping into the air with all four feet simultaneously.


PRONKING MOTION - SPRINGBOKS
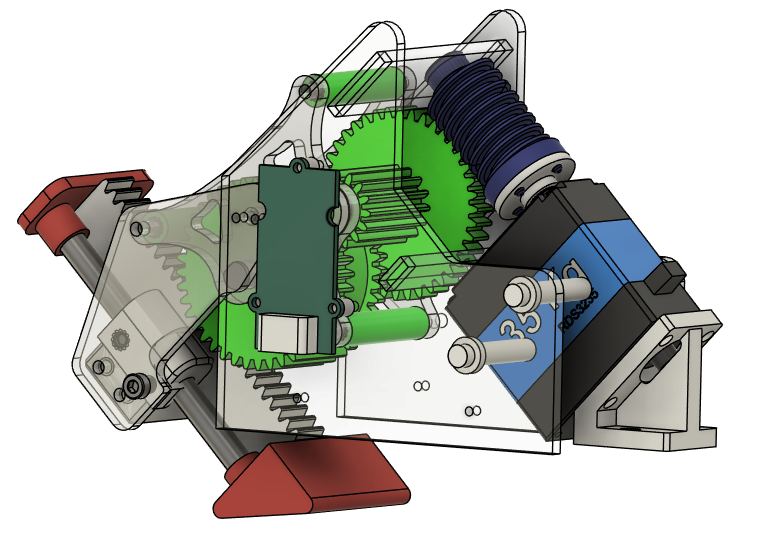
The robot featured a unique gearbox configuration with a 248:1 gear transmission. This gearbox included a rack plunger, negative groove gear, stacked gear, and worm gear, all assembled using acrylic plates.
The design's key innovation was the use of a negative groove in the last driving gear of the transmission. This feature allowed the rack plunger to de-mesh and release stored energy efficiently when fully loaded. By using this mechanism, only one motor was needed for both loading and unloading the spring plunger system, simplifying motor coordination and reducing weight.
The robot had two of these jumping mechanism assemblies: one mounted at the front and one at the rear.
SPRING-LOADING MECHANISM GEARTRAIN
Hopper successfully validated the hypothesis (to an extent) by demonstrating that it's Cost of Transport (CoT) of 80.92 is competitive with traditional wheeled robots, such as the Sojourner and Lunokhod 2. Despite missing a flight-phase balancing mechanism, which likely impacted the CoT measurements, Hopper showed promising efficiency. It's important to note, however, that unlike some of the comparable rovers equipped with heavy subsystems like drills and communication tools, Hopper's simpler design inherently contributes to a lower CoT.
